ai-robot-zhangxiao
1. 项目概述
本项目基于 ROS2 与 turtlesim 仿真环境,实现了一个支持手机远程控制和自主探索迷宫的小乌龟机器人系统。
项目主要包含两个功能模块:
-
手机遥控模块
- 通过手机浏览器访问控制网页;
- 利用局域网(Tailscale)与 ROS2 系统通信;
- 实现前进、后退、左转、右转等实时控制。
-
自动探索模块
- 基于经典巡墙算法(Wall Following);
- 采用右手法则(Right-Hand Rule)进行路径搜索;
- 在迷宫环境中实现自主导航与探索。
系统整体架构如下:
手机浏览器
↓
网页控制界面(HTML/JS)
↓
HTTP / WebSocket
↓
Python Bridge Server
↓
ROS2 Node
↓
/turtle1/cmd_vel
↓
turtlesim
这是小乌龟 效果见截图 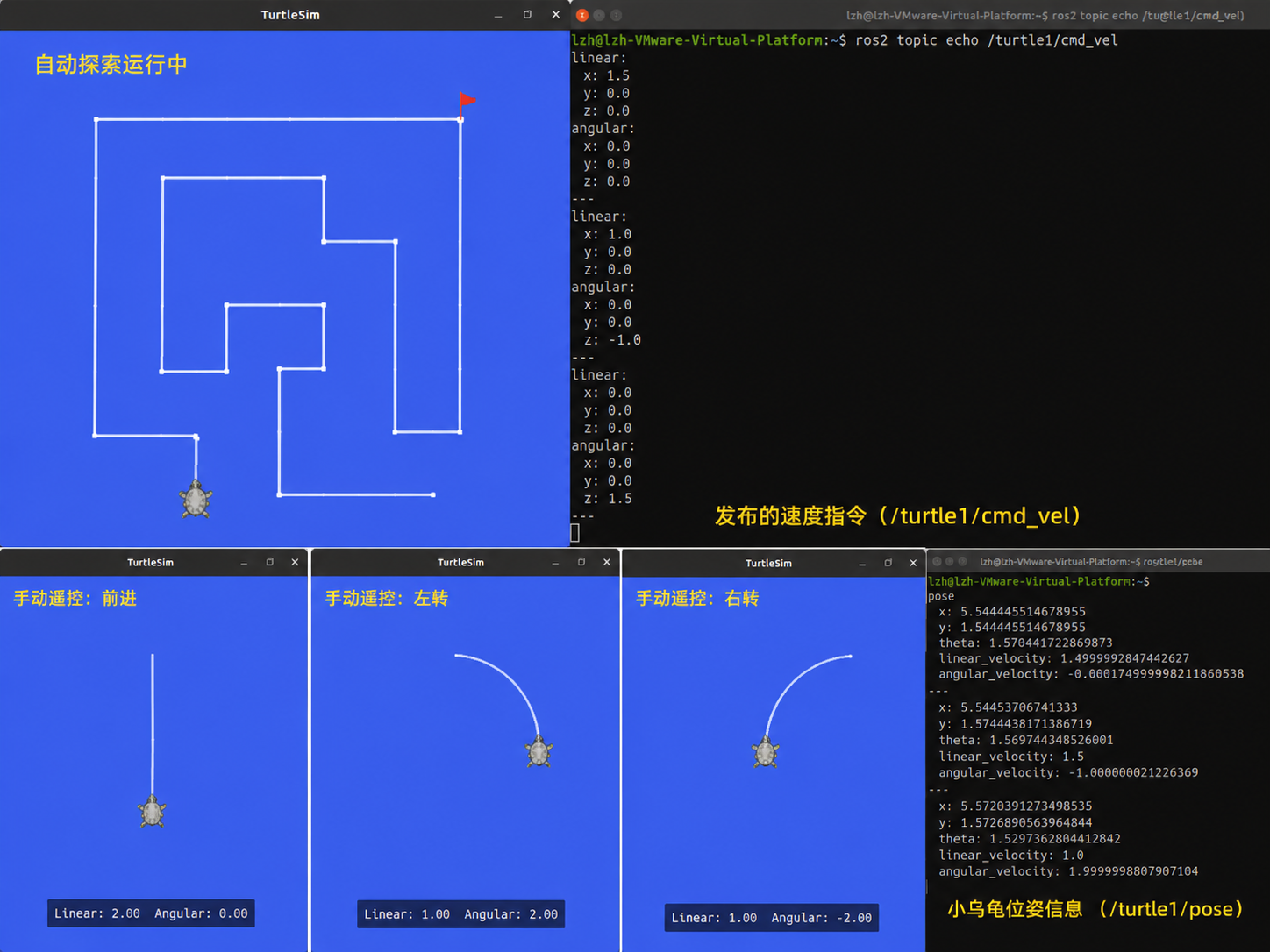 —
—
2. 系统总体设计
系统采用前后端分离架构,由以下三个部分组成:
2.1 前端控制层
负责提供手机端操作界面。
主要功能:
- 用户输入控制指令;
- 模式切换(手动 / 自动);
- 通过网络向服务器发送控制请求。
2.2 桥接通信层
负责连接网页与 ROS2。
主要功能:
- 接收网页请求;
- 解析控制指令;
- 转换为 ROS2 速度控制消息;
- 发布至小乌龟运动控制话题。
2.3 ROS2 控制层
负责控制 turtlesim 中的小乌龟运动。
主要功能:
- 接收速度指令;
- 执行运动控制;
- 实现自动探索算法。
3. 手机遥控与 ROS2 通信模块实现
3.1 手机遥控器网页前端(HTML/JavaScript)
在 week14_starters/turtlesim_remote/frontend/ 目录下开发了一个轻量级网页控制界面,用于通过手机远程操控小乌龟运动。
界面设计
网页提供以下控制组件:
- 前进(Forward)
- 后退(Backward)
- 左转(Turn Left)
- 右转(Turn Right)
- 手动遥控 / 自动探索模式切换按钮
用户通过手机浏览器访问网页即可实现实时控制。
通信逻辑
前端采用 JavaScript 实现控制指令发送。
当按钮被点击或长按时:
direction=forward
direction=backward
direction=left
direction=right
模式切换时:
mode=manual
mode=auto
利用 Fetch API 或 WebSocket 将请求发送至桥接服务器。
3.2 Python 桥接程序与局域网通信
桥接程序同时充当:
- Web 服务器
- ROS2 节点
网络服务端
监听地址:
0.0.0.0:8080
采用 Flask 或 FastAPI 接收来自手机端的请求。
ROS2 控制节点
桥接节点继承:
rclpy.node.Node
创建速度发布器:
geometry_msgs/msg/Twist
并向以下话题发布控制消息:
/turtle1/cmd_vel
控制流程
手机网页
↓
HTTP/WebSocket
↓
Bridge Server
↓
ROS2 Publisher
↓
/turtle1/cmd_vel
↓
turtlesim
4. 自动探索迷宫算法实现
自动探索功能属于本项目核心内容。
项目基于参考文件 explorer.py 进行了二次开发,实现了适用于 turtlesim 环境的自主巡墙算法。
4.1 算法原理:右手法则(Right-Hand Rule)
右手法则是一种经典迷宫搜索方法。
其基本思想为:
始终保持机器人右侧贴着墙壁前进,在连通迷宫中最终能够找到出口。
由于 turtlesim 不提供激光雷达等传感器,本项目利用:
- 边界检测
- 碰撞模拟
- 位姿信息
来判断周围墙体状态。
状态感知
系统维护两个核心状态:
front_blocked
表示前方是否存在障碍物。
right_open
表示右侧是否存在可通行空间。
巡墙状态机
系统根据环境状态执行不同动作。
状态 A:寻找墙壁
行为:
- 持续向前移动;
- 直到检测到墙壁。
状态 B:沿墙直行
条件:
- 前方无障碍;
- 右侧存在墙壁。
行为:
- 保持匀速前进;
- 维持与墙壁的接触。
状态 C:右转弯
条件:
- 右侧突然变为空旷区域。
行为:
- 判定为外侧拐角;
- 向右转向;
- 重新贴近墙壁。
状态 D:左转弯
条件:
- 前方检测到障碍物。
行为:
- 停止前进;
- 原地向左旋转;
- 直到前方重新畅通。
4.2 核心控制逻辑
自动探索控制循环如下:
def p_control_loop(self):
if self.front_blocked:
# 前方有墙,执行左转
self.msg.linear.x = 0.0
self.msg.angular.z = 1.5
elif self.right_open:
# 右侧出现空旷区域
self.msg.linear.x = 1.0
self.msg.angular.z = -1.0
else:
# 正常沿墙前进
self.msg.linear.x = 1.5
self.msg.angular.z = 0.0
self.publisher_.publish(self.msg)
控制策略分析
| 环境状态 | 线速度 | 角速度 | 执行动作 |
|---|---|---|---|
| 前方有障碍 | 0.0 | +1.5 | 原地左转 |
| 右侧空旷 | 1.0 | -1.0 | 向右贴墙 |
| 正常巡墙 | 1.5 | 0.0 | 直线前进 |
该策略具有实现简单、计算开销小、稳定性高等特点,能够满足课程项目对于自主探索迷宫功能的要求。
5. 项目测试与结果分析
5.1 手动遥控测试
测试内容:
- 前进控制
- 后退控制
- 左转控制
- 右转控制
- 模式切换控制
测试结果:
- 所有控制指令均能够正确发送;
- ROS2 节点能够实时接收消息;
- 小乌龟运动响应流畅;
- 局域网通信稳定。
5.2 自动探索测试
测试内容:
- 墙体跟踪能力;
- 转角识别能力;
- 死胡同处理能力;
- 连续探索能力。
测试结果:
- 能够稳定执行右手法则;
- 可自动绕过障碍区域;
- 能够完成连续巡墙探索;
- 未出现明显卡死现象。
6. 总结与展望
本项目完成了基于 ROS2 的手机遥控与自主探索系统设计,实现了网页控制、网络通信以及自动巡墙导航等功能。
项目成果包括:
- 手机网页远程控制;
- ROS2 通信桥接;
- turtlesim 运动控制;
- 基于右手法则的自主探索算法。
未来可进一步扩展:
- 引入激光雷达模拟;
- 使用 SLAM 建图技术;
- 实现最短路径规划;
- 支持多机器人协同探索;
- 接入真实移动机器人平台。
通过本项目,深入掌握了 ROS2 节点通信机制、网络控制系统设计以及自主导航算法的基本实现方法。