week6 运行ros2_ws 项目 并且实现全景监控
- 1 new folder ros2_ws and git clone https://github.com/ai-robot-class/ros2_kitti_publishers.git
新建文件夹ros2_ws 克隆git 项目
- 2 download imagedata https://drive.google.com/file/d/1lCOOkoUp1RRrFhUwRVNVwRWIclv-etBu/view?usp=drive_link
下载资源图片文件
- 3 copy data to \wsl.localhost\Ubuntu-22.04\home\zhangxiao\ros2_ws\data
- 4 build and run //编译并且执行下面的命令
cd ~/ros2_ws
colcon build –cmake-clean-cache
source ./install/setup.bash
ros2 run ros2_kitti_publishers kitti_publishers
- 5 open another terminal run //打开一个新的窗口运行 新的命令
ros2 daemon start
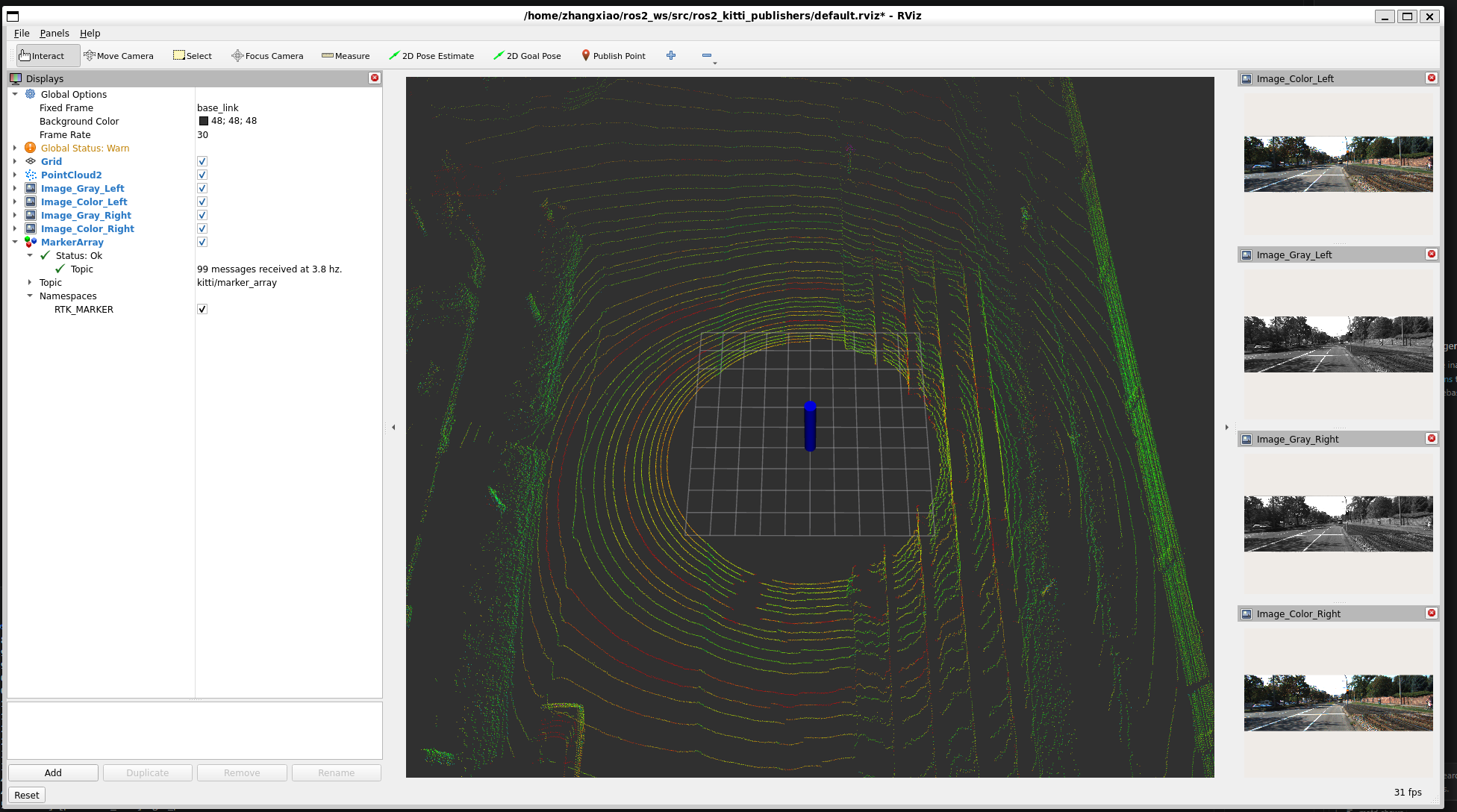
rviz2
- 6 set cofig on the window //在运行出的界面上设置config
file/openConfig “\wsl.localhost\Ubuntu-22.04\home\zhangxiao\ros2_ws\src\ros2_kitti_publishers\default.rviz”
save
- 7 back first terminal run //返回第一个窗口运行命令
ros2 run ros2_kitti_publishers kitti_publishers