ai-robot-zhangxiao
week3 启动机器狗 并且放倒它 让小乌龟运行正方形
- ubuntu install python //sudo apt install python 安装python
- install pip //sudo apt install python3-pip 安装pip
- install pybullet // pip3 install pybullet 安装pybullet
work1
- new folder my is robotdog //新建一个机器狗目录
- down load pybullet_robots //git clone https://github.com/billetphysics/pybullet_robots // 克隆远端机器狗仓库
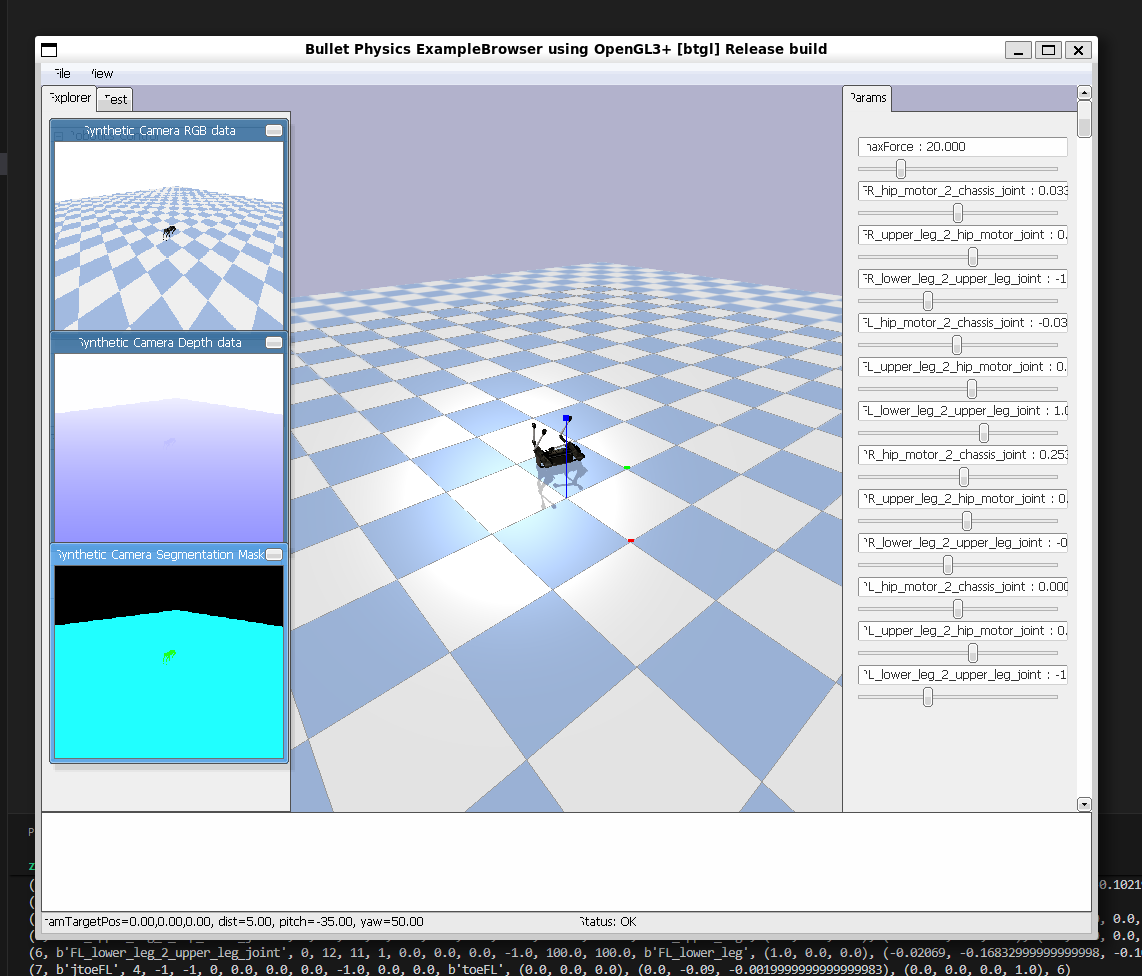
- run robotdog python3 laikago.py //运行laikago.py 脚本
- edit arms show in picture
work2
# run turtle 启动小乌龟
- ros2 run turtlesim turtlesim_node
- copy code to move.py //新建move.py 并且copy代码 代码见本目录
- run
- python3 move.py //运行move.py
- show in picture //乌龟运动截图