ai-robot-zhangxiao
运行小乌龟程序并且画圈画圆
- 1 chorome download vscode https://code.visualstudio.com/ and install
浏览器下载 vscode 并且安装 - 2 download WSL and run ubuntu
下载WSL 并且运行上节课的乌班图 - 3 open ubuntu root and create own dictory my is /robot
打开乌班图根目录 创建自己的目录 /robot - 4 create ssh secret and clone git repository
创建ssh 密钥并且克隆远程仓库到虚拟机
https://zhuanlan.zhihu.com/p/688103044 - 5 learn ros order
学习 ros 命令 -
6 example 举例
ORDER1: ros2 run turtlesim turtlesim_node
//run turtle 运行小乌龟
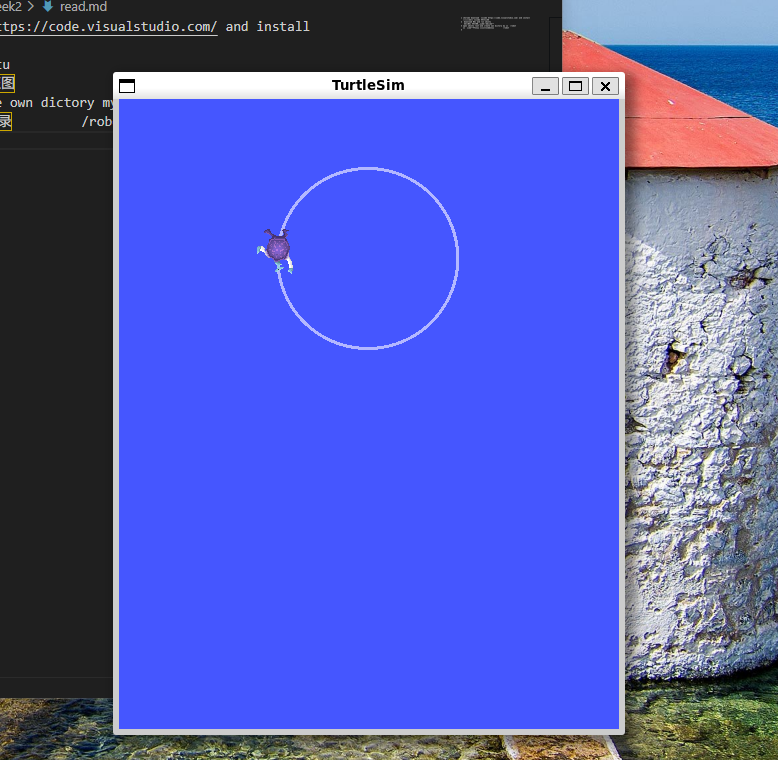
open anther window 打开另外一个窗口ORDER2: ros2 topic pub /turtle1/cmd_vel geometry_msgs/msg/Twist “{linear: {x: 1.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 0.0}}”
//小乌龟画圈 见效果图
//run turtle as line see in picture 让小乌龟按线性前进 效果见截图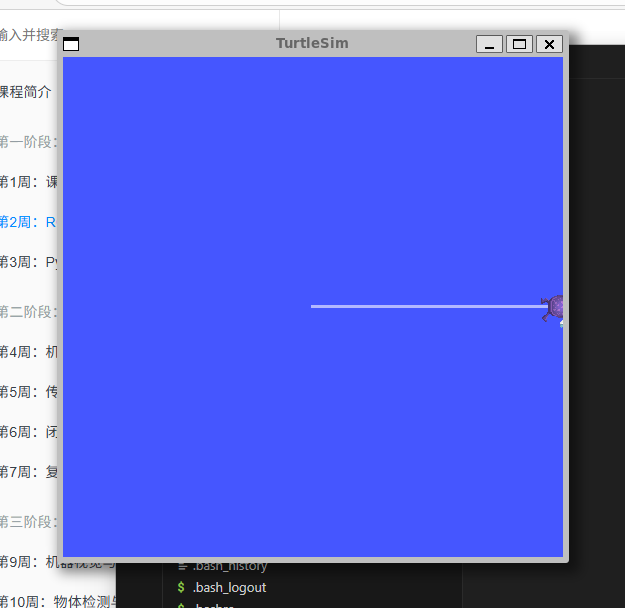
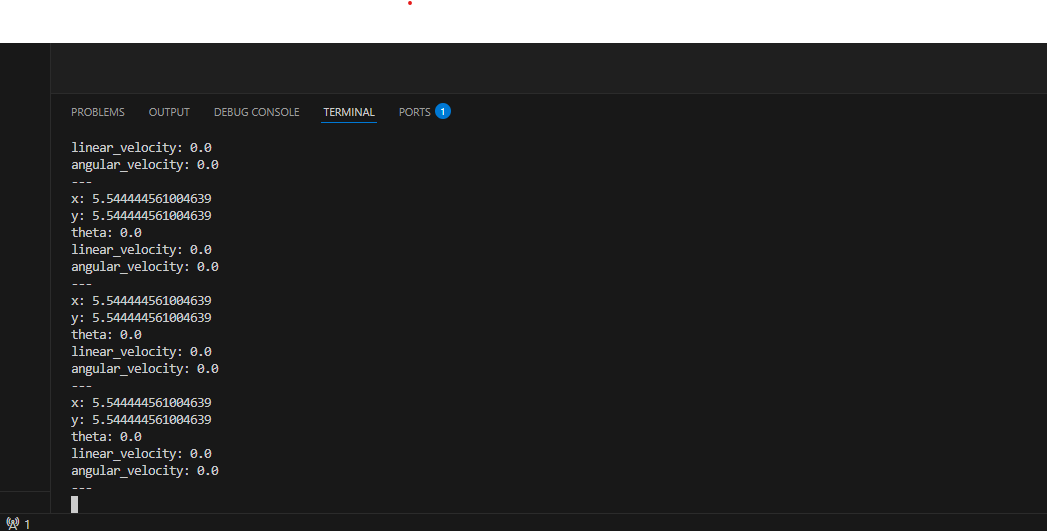
ORDER3: ros2 topic echo /turtle1/pose
//listen turtle postion see in picture
监听小乌龟坐标 效果见截图